








News









































高速高トルクモーターの利点は何ですか?
高速高トルクモーターの紹介
技術の進歩と持続可能なモビリティソリューションの需要の高まりに牽引されている電気自動車(EV)は、自動車産業に革命をもたらしています。電気自動車の分野を形成する多くのイノベーションの中で、高速でハイトルクモーターはゲームチェンジャーとして際立っています。このブログでは、高速で高トルクモーターの利点を探り、デザイン、利点、技術、費用対効果、環境への影響、将来の傾向を掘り下げています。
高速および高トルクモーターは、高速で大量のトルクを出力できるモーターです。高速と高トルク出力を組み合わせるように設計されたこれらのモーターは、通常、速い応答と高出力を必要とするアプリケーションで使用されます。 「高速」と「高トルク」は、モーター設計の相互に制限的な属性と見なされることがよくありますが(一般に、モーターの速度が増加するにつれてトルクが減少するため)、2つの組み合わせは特定の技術と設計によって達成できます。 、永久磁石材料の使用、最適化された電磁設計、改善された冷却システムなど。
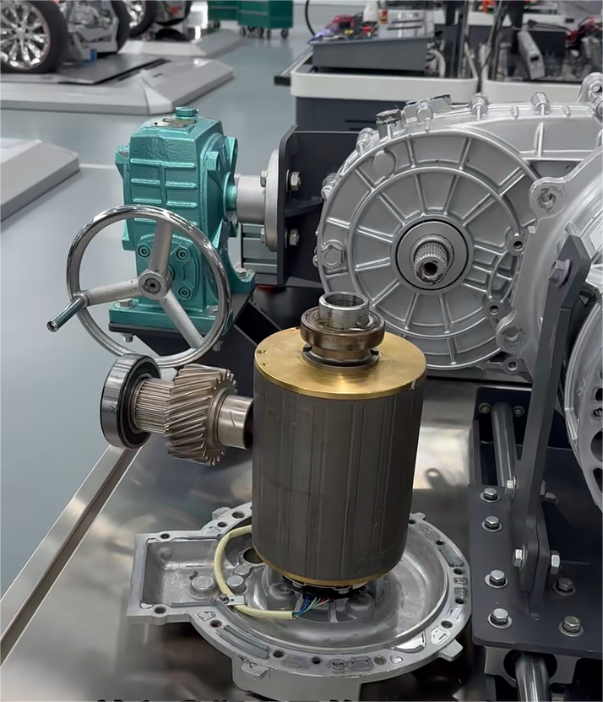
高速モーターは通常、10,000 rpmを超える速度のモーターとして定義され、ローターの線形速度は50m/sを超えるか、さらに高い標準であり、高速および超高速モーターをさらに際立たせます。パワーとスピードの産物。高トルク特性により、モーターは小さなサイズの強力なトルク出力を提供する必要があります。これは、磁気回路の設計を強化し、磁束密度を増加させるか、内部ローター永久磁石モーターなどの特別なモーター構造を使用することによって達成されることがよくあります。
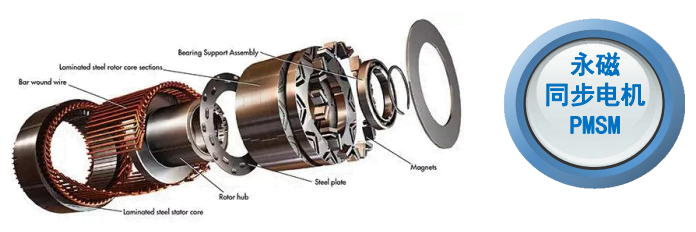
実際の用途では、高速および高トルクモーターは、誘導モーター、永久マグネットモーター、または切り替えられた不動性モーターなど、その中にあります。永久マグネットモーター(PMSMS)高速と広い速度の範囲のために、高速と高トルクの両方の要件を満たす必要があるアプリケーションではより一般的です。たとえば、高速、高トルクモーターは、電気自動車、精密機械、航空宇宙機器、および高速かつ正確なポジショニングを必要とする工業用ロボットの高性能駆動システムの重要なコンポーネントです。
高速とトルクを達成するには、モーター設計では、高速で遠心力力に耐えるためのローター強度の増加、温度上昇を制御する効率的な冷却システム、およびサポートする磁気ベアリングなどの特別なベアリングシステムの可能性など、多くの課題を克服する必要があります。高速回転。さらに、モーターの安定した動作を確保するために高周波電流と電圧を処理する必要があるため、モーターコントローラー(MCU)の設計も重要です。
高速高トルクモーターの重要な利点
高速および高トルクモーターの利点は次のとおりです。
1。高トルク出力:定格速度範囲では、高速および高トルクモーターには高いトルク出力があり、大きな負荷と低速動作のアプリケーションのニーズを満たすことができます。
2。高効率:このタイプのモーターは、低電力条件下でより多くのトルクを出力する可能性があり、それによりシステムのエネルギー消費が減少します。
3.正確な制御:高速および高トルクモーターの制御精度は高く、閉ループ制御を実現できます。これは、精密位置および均一な動きおよびその他のフィールドに適しています。
4。高速性能:モーターの高速では、高速操作アプリケーションに適しています。
5。低ノイズ:低動作ノイズは、ノイズが高すぎるノイズや振動を生成しません。高いノイズ要件を持つアプリケーションに適しています。
6.高出力密度:高速のため、モーターの体積は同じ電力の通常のモーターの体積よりもはるかに小さく、材料を効果的に節約できます。
7.高透過効率:高速および高トルクモーターは、従来の減速メカニズムをキャンセルするプライムモーバーに直接接続でき、それにより伝送効率が向上します。
8。高速動的応答:高速モーターの慣性モーメントは小さく、動的応答が速くなります。
9。強力な適応性:高速および高トルクモーターは、貨物輸送や公共交通機関など、さまざまなシナリオに適応できます。
10。メンテナンスの低いコスト:高速モーターを製造することは困難ですが、メンテナンスコストは比較的低く、サービス寿命は長いです。
これらの利点により、高速および高トルクモーターは、産業機械、自動化機器、新しいエネルギー車両など、高トルク出力、正確な制御、高速操作を必要とするアプリケーションでうまく機能します。
高速および高トルクモータータイプの選択
(1)中および低速の労働条件の適用において、永続的なマグネットモーターは、効率的な利点を持つ主流を占有します。
(2)中および高速作業条件の適用において、誘導モーターと永久磁石モーターが共存する。
(3)超高速アプリケーションでは、誘導モーターが大部分です。
高速高トルクモーターの技術的利点
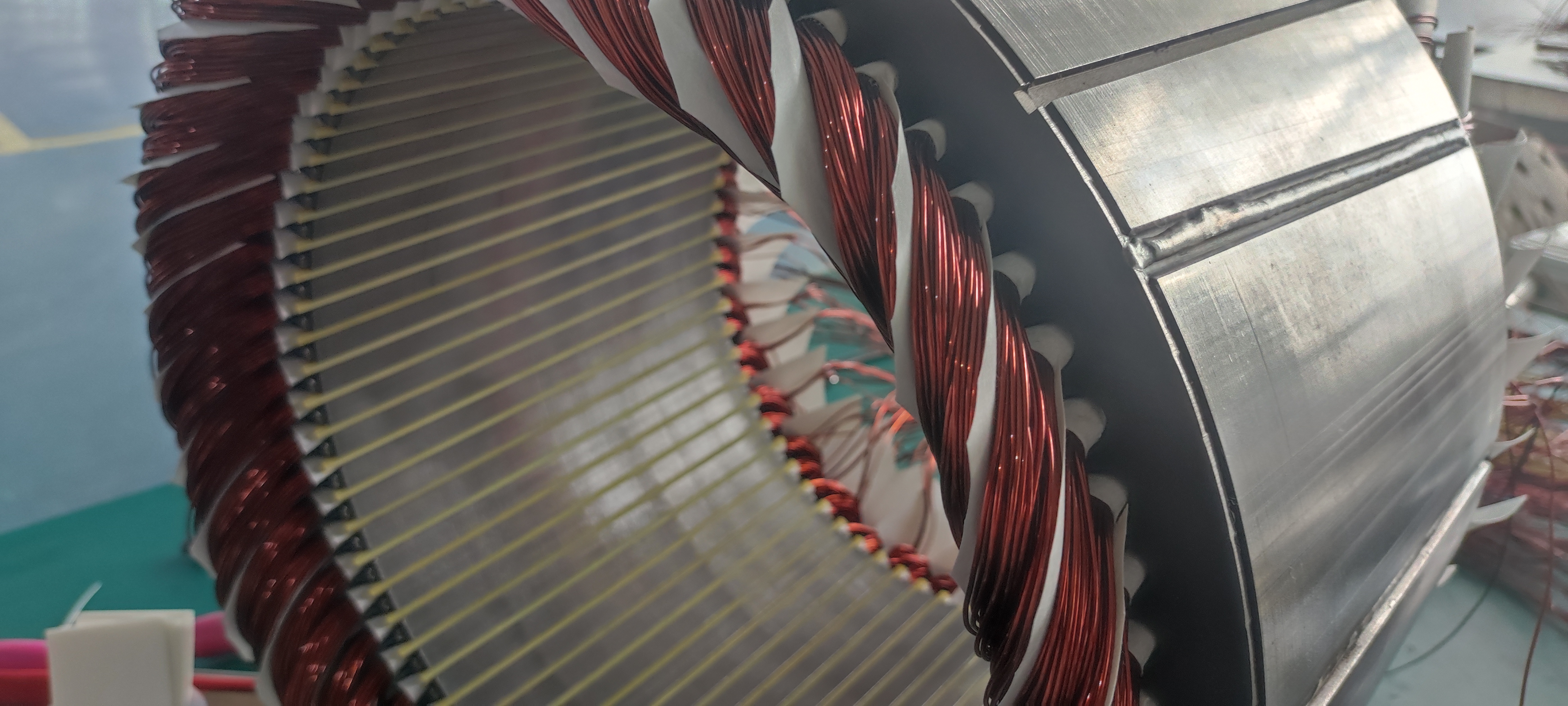
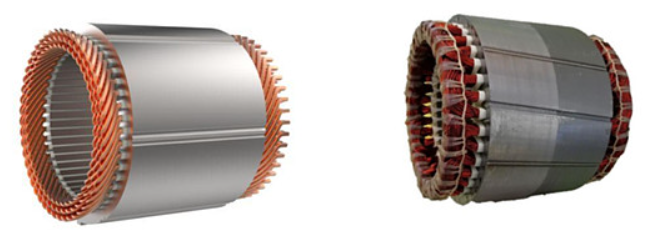
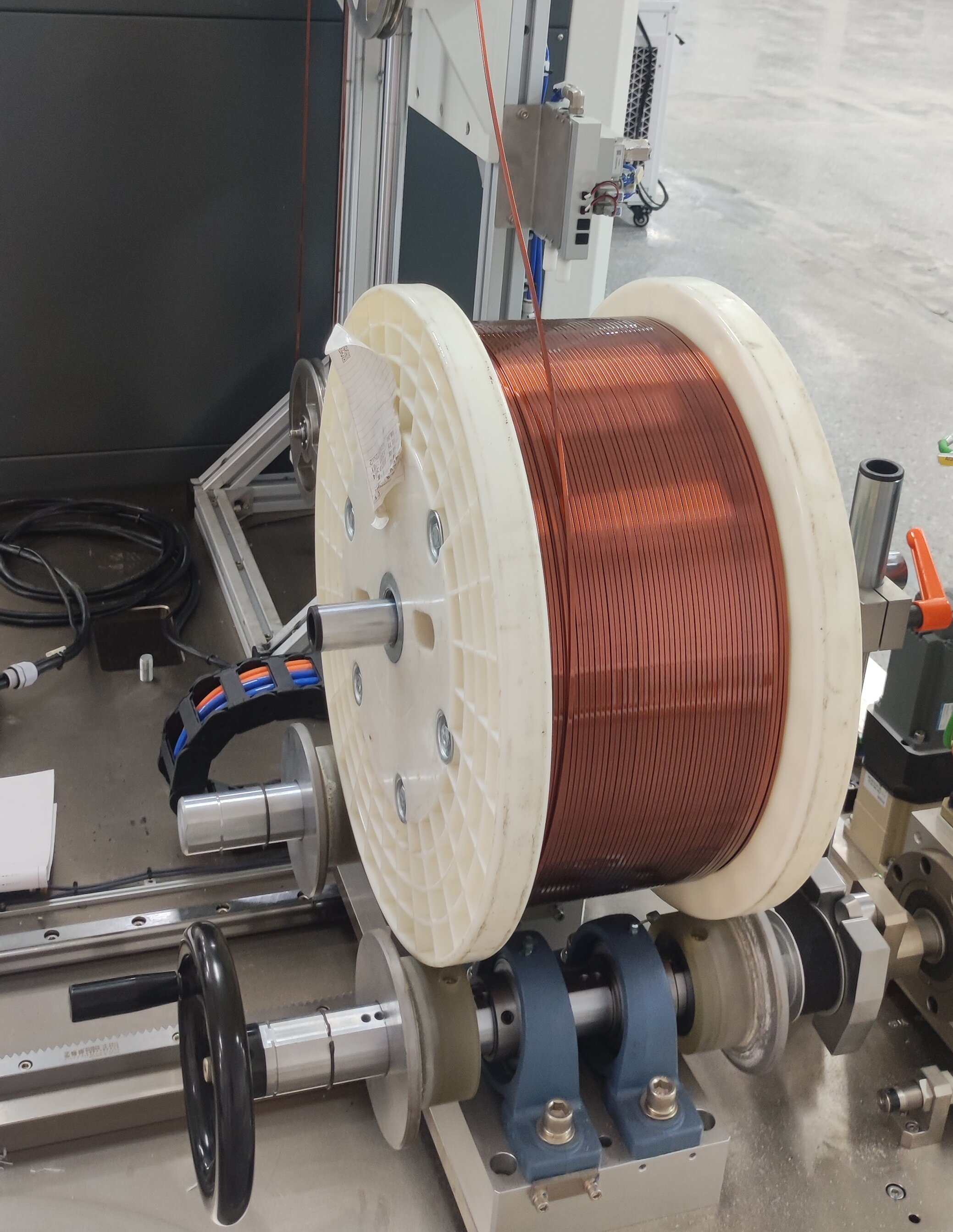
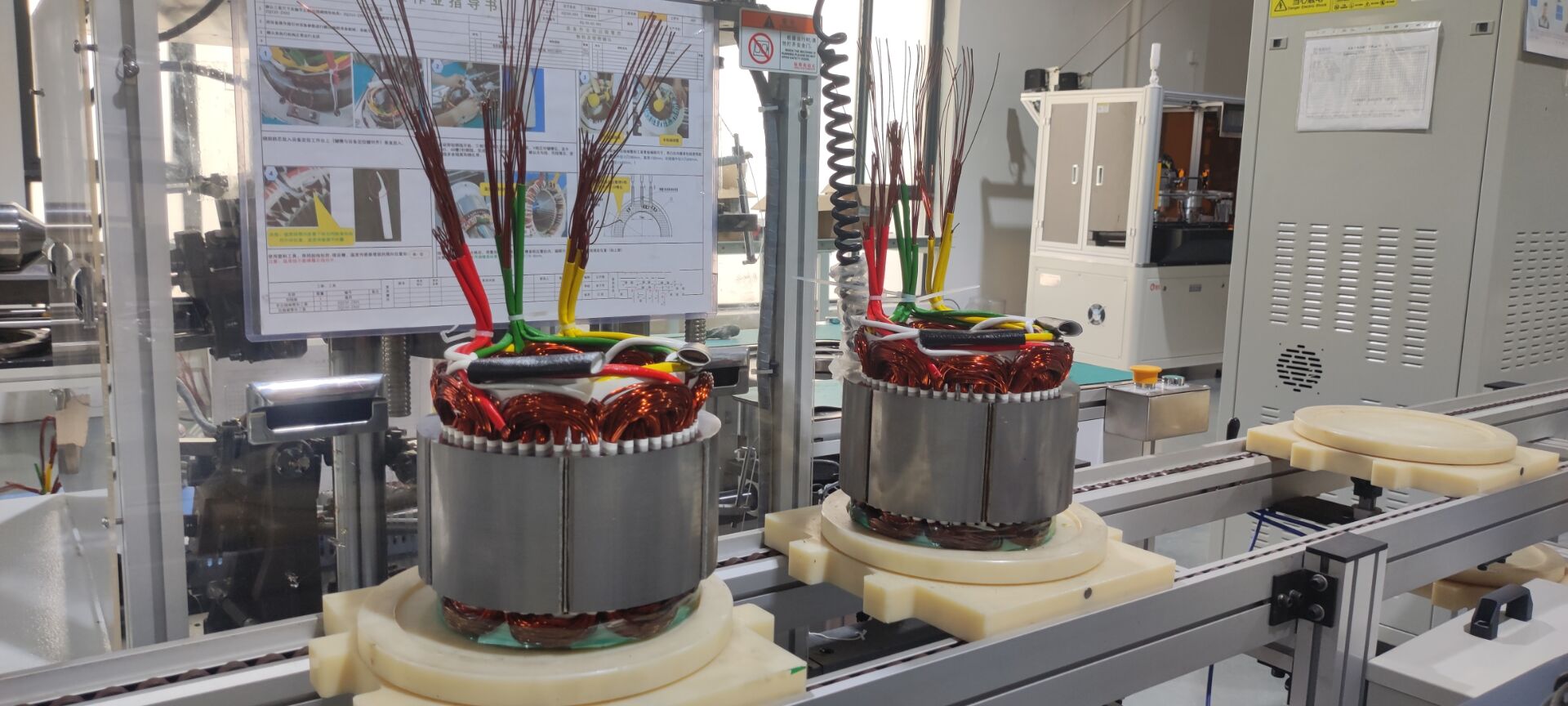
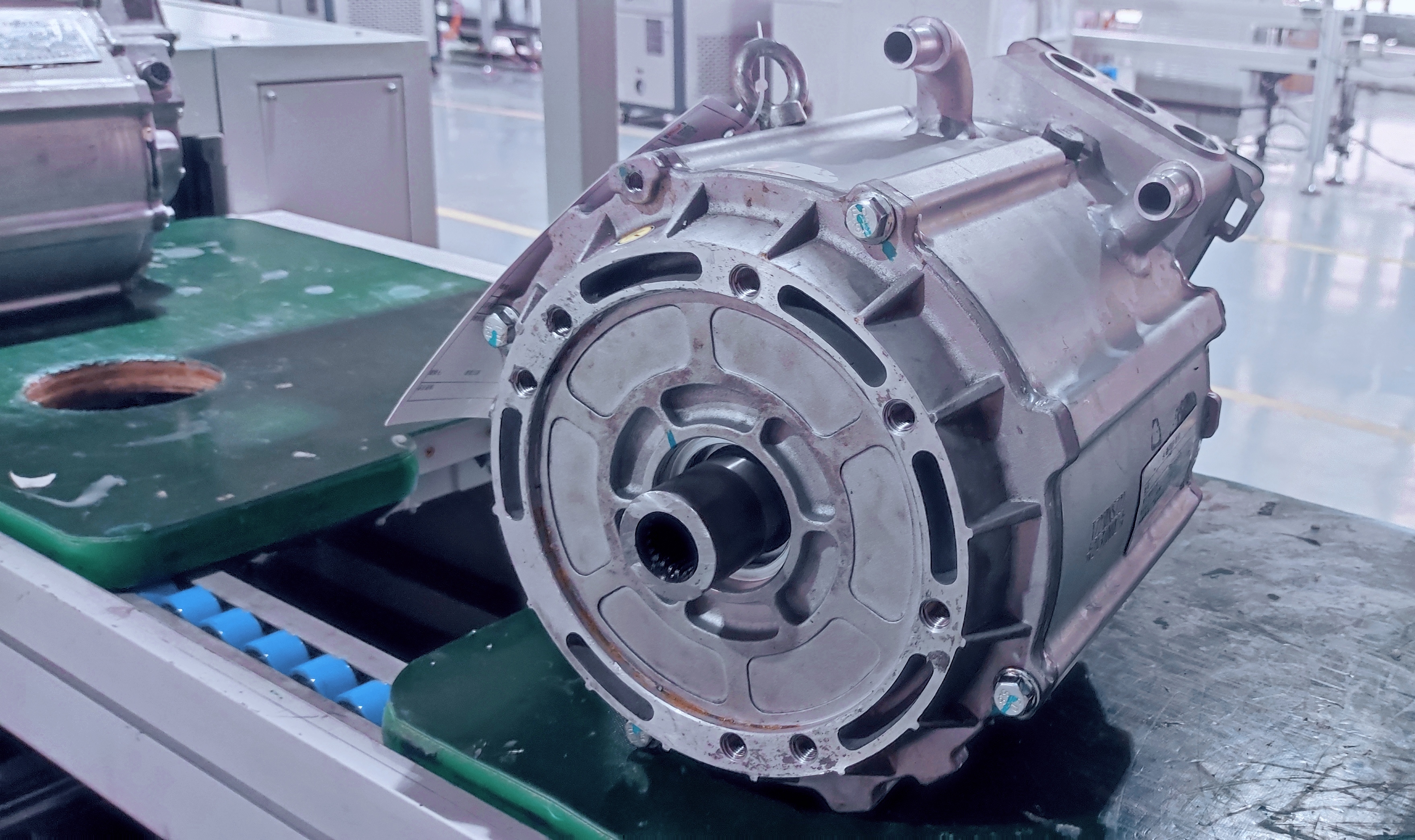
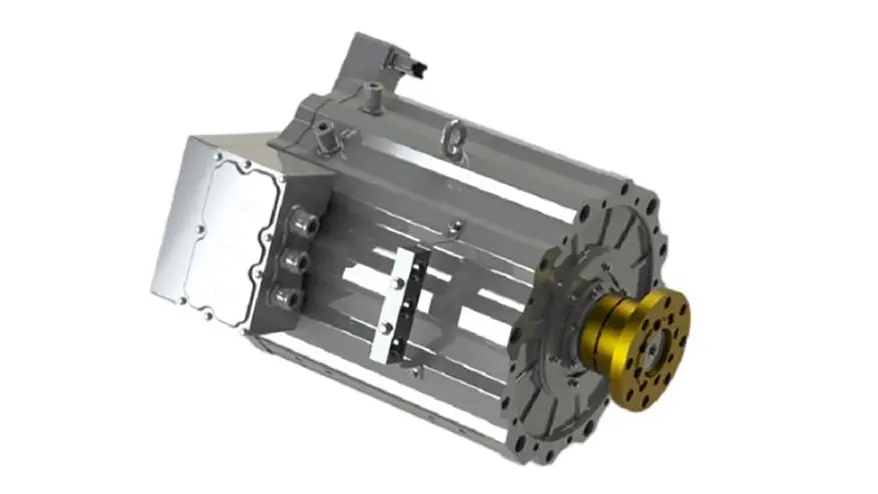
高速および高トルクモーターのサイズは小さく、高速負荷(直接駆動)に直接接続でき、従来の機械速度増加デバイスの必要性を排除し、システムノイズを削減し、システム伝送効率を向上させます。現在、主な高速モーター、永久マグネットモーター、および切り替えられた不動性モーターが正常に実現されています。高速モーターの主な特徴は、高速度、コアのステーター巻き電流と高磁束周波数、および高出力密度と損失密度です。これらの特性は、高速モーターには通常の速度モーターとは異なるユニークな主要な技術と設計方法があり、設計と製造の難しさは通常の高速モーターと比較して2倍になることが多いことを決定します。
高速および高トルクモーターの主要な技術
高速、超高速、高トルクの適用には幅広い見通しがありますが、同時にモーターに非常に高い課題をもたらします。これらの問題を同様のアイテムと組み合わせると、4つのカテゴリがあることがわかります。それらは、熱放散、タイプの選択、振動と騒音、効率的な設計です。
(1)熱散逸:速度の幾何学的進行とともにモーターの損失が増加し、高い損失によって発生する熱により、高速動作を維持するために、モーターの温度上昇が非常に速くなります。良好な熱散逸で冷却方法を設計します。高速モーターの一般的な冷却方法には、内部強制空気冷却と内部オイル冷却が含まれます。
(2)モーターの選択:高速モータータイプの選択は、標準的な答えなしで常に質問でした。一般的に、電力密度と効率の観点から見ると、永久磁石モーターを選択することが有利ですが、誘導モーターとスイッチドリュータンスモーターは、信頼性の観点から選択されます。ただし、振動とノイズが高いため、切り替えの抵抗の適用は少なくなります。誘導モーターは、超高用途の大部分であり、高速アプリケーションでは誘導モーターと永久マグネットモーターが共存しています。
(3)振動と騒音:振動とノイズの問題は、高速モーターにとって大きな障害です。通常のモーターと比較して、ローターの臨界速度やシャフトの偏向振動など、ローターのダイナミクスによって引き起こされる振動の問題があります。また、高周波電磁力によって生成される音響ノイズの問題もあり、高速モーターの電磁頻度周波数が高く、分布範囲がより広く、ステーターシステムの共鳴を引き起こすのは非常に簡単です。
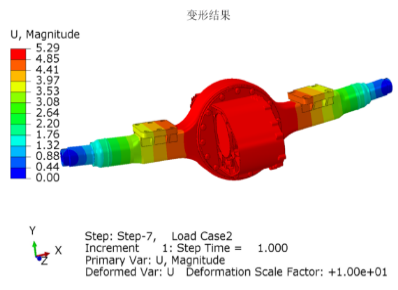
臨界速度振動を回避するために、高速モーターのローター設計は非常に重要であり、厳密なモーダル分析とテストが必要です。アスペクト比は、設計の最適化変数として使用する必要があります。ローターの設計は厚すぎて短いため、臨界速度の上限を増やすことができ、共鳴する傾向がありますが、ローターの困難は遠心分離機を克服するのが難しいストレスが増加します。一方、細長いローターの設計は遠心強度の問題を改善しますが、臨界速度が低下し、共鳴の確率が増加し、電磁能も減少します。したがって、ローターの設計は繰り返しバランスをとる必要があります。これは、高速モーターの設計における最優先事項です。
(4)効率的な設計:速度の幾何学的進行とともに運動損失が増加し、高い損失により、高効率を達成するためには、あらゆる種類の損失を制御する必要があります。鉄の消費量を例にとると、渦電流損失を減らすために、0.10 mmと0.08 mmの超薄いシリコン鋼シートが一般的に使用されます。超薄いシートは渦電流の損失を減らすことができますが、ヒステリシスの損失を改善することはできないため、超薄いシートの鉄損失とヒステリシスの損失は大多数を占め、一方、通常のシートの渦電流損失は大多数を占めています。ヒステリシスの損失を改善するために、次の3つの方法から始めることができます。
●磁場設計を最適化して、磁場の正弦波を改善し、高調波の鉄の損失を減らします。
●磁気荷重を減らし、熱負荷を増やし、基本的な鉄の消費を減らします。
●材料の選択から始めて、ヒステリシスの損失が少ないシリコン鋼板を選択します。
鉄の損失に加えて、高速および高トルクモーターもAC損失に特に注意を払う必要があります。これは、しばしば磁石、金属鞘、固定子の外側に現れる高周波交互の磁場の浸透によって引き起こされます。巻線。磁石のAC損失を例にとると、一般的な方法は、磁石を複数のセグメントに分割することです。これは、放射状または軸方向にセグメント化できます。セグメンテーションは、渦循環領域を減らし、ACの損失を減らすことができます。
高速および高トルクモーターの課題:
1.高速および高トルクモーターの損失の問題:速度の増加とともに、モーターの損失も幾何学的に増加し、鉄のコアの巻き電流と磁束交互周波数の増加は、増加につながります基本的なモーターの損失のため、モーターが真剣に熱くなります。さらに、ローター表面は高速でエアギャップをこすり、摩擦損失は通常の速度モーターの摩擦損失よりも高くなります。永久磁石モーターの場合、高速後に渦電流損失が大きくなり、磁気鋼が深刻に加熱され、熱散逸が小さくなり、消化のリスクが大幅に増加します。
鉄の損失を例にとると、渦電流の損失を減らすために、0.1または0.08mmの超薄型シリコン鋼シートが一般的に使用されます。ウルトラチンシリコン鋼シートは渦電流損失を減らすことができますが、ヒステリシスの損失を変えることはできません。損失には、3つの方法があります。(1)磁気回路の設計を最適化し、磁場の副鼻腔性を改善し、高調波鉄の損失を減らす。 (2)磁気荷重を減らし、熱負荷を増やし、基本的な鉄の消費を減らす。 (3)材料は、ヒステリシス損失が少ないシリコン鋼板として選択されます。
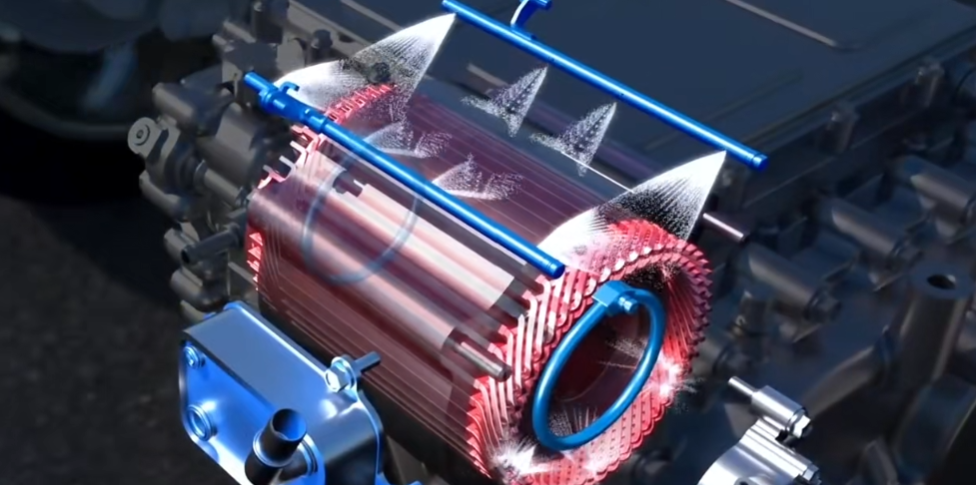
2。高速および高トルクモーターの熱散逸の問題:高速および高トルクモーターは、高出力作業の下で多くの熱を生成し、温度を安定させるために効果的な熱散逸システムが必要です。過熱がモーターの性能と寿命に悪影響を与えるのを防ぎ、ローターコアと磁石の冷却を強化します。モーターには、オイル冷却と水冷の2つの一般的な冷却方法があります。一般的に、高速モーターは高性能冷却と組み合わせる必要があり、冷却チャネルが巻線に配置され、冷却パイプラインが巻線に直接接触するためにステーターグルーブに配置され、冷却水は冷却のために循環し、冷却水は循環し、巻線の冷却効率を改善するために、熱散逸。
オイル冷却により、ローターシャフトがオイルを流すことができ、ローターが回転すると、内部オイルをステーターの端まで投げて、モーターのステーターとローターを冷却できます。さらに、ハウジング上のオイルパイプの配置は、モーターのスプレー冷却も実現することができます。テスラ、トヨタ、その他のOEMには、ローター冷却設計があります。高速永久磁石同期モーターの熱エネルギー管理技術は、空冷から水冷までのモーター冷却システムの開発、現在はオイル冷却まで、ステーターとステーター間の充填材料の開発プロセスなど、一連の開発を受けています。ウォータージャケット、および「Vタイプ」および「ダブルVタイプ」から「U字型」および「U+1タイプ」などのモーターのステーターとローター構造。統合システムの熱散逸効率。高速操作を維持するために、シェーフラーのステーター内タンク冷却技術など、優れた熱散逸設計もテーブルに持ち込まれます。ヨークの明快なスロット付きオイル冷却は、冷却油を銅線巻線に近づけます。
Borgwarnerの中心油冷却技術により、クーラントは凸油回路構造とコアのオイルホール設計を通して巻線を完全に覆うことができ、デッド角度散布がないようにします。オイル冷却やハイブリッド冷却などの技術の実装は、モーターのピークパワーの割合時間を大幅に改善し、より多くの力を生み出すことができます。さまざまな高度な冷却技術だけでなく、新しい課題も全体的な熱管理技術にもたらされます
3.高速モーターおよび高トルクモーターの振動とノイズ:通常のモーターと比較して、高速モーターの電磁頻度が高く、分布範囲が広く、ローターの臨界速度、偏向振動の臨界速度はモーターシャフト、および高周波電磁力の泣き声は、ステーターシステムの共鳴を引き起こすのが簡単です。高速モーターの高速では、騒音や振動の問題を引き起こす可能性があり、より滑らかで静かな運転体験を提供するには、最適化された設計と減衰手段が必要です。
重大な速度振動を回避するには、ローターの設計を中に分析してテストする必要があります。ローターの設計が短すぎて厚すぎると、臨界速度の上限が増加し、共鳴する傾向がありませんが、遠心ストレスを克服するためのローターの困難は増加します。逆に、ローターの設計が遅すぎると、遠心強度の問題が改善されますが、臨界速度が下向きにシフトし、共鳴の確率が増加し、電磁能が減少します。したがって、ローターの設計は、絶え間ないトレードオフとバランスのプロセスです。
4.高速高速モーターを制御するための高速および高トルクモーターの課題には、高周波電流が必要です。これは、インバーターのパワーデバイスにとって大きな課題です。さらに、高速モーターで一般的に使用されるセンサーレスアルゴリズムは、インバーターの非線形性、空間高調波、ループフィルター、インダクタンスパラメーター偏差などの因子の影響を受けやすく、ローター位置推定誤差をもたらします。
5。モータードライブの設計
高速モーターとハイトルクモーターのモータードライブ設計も困難なポイントです。モーターの電=極の数xモーターの機械的速度、および新しいエネルギー車両のメインドライブモーターの極ペア数は一般に4であるため、例として20000rpmの機械速度を取得します。メインドライブモーターの電力速度は80000RPMで、周波数に切り替えると80000/60 = 1333Hzです。 1333Hzの基本周波数は、より良い制御効果を得るために、PWMの周波数は30x133333Hz = 40kHzを超える必要があります。
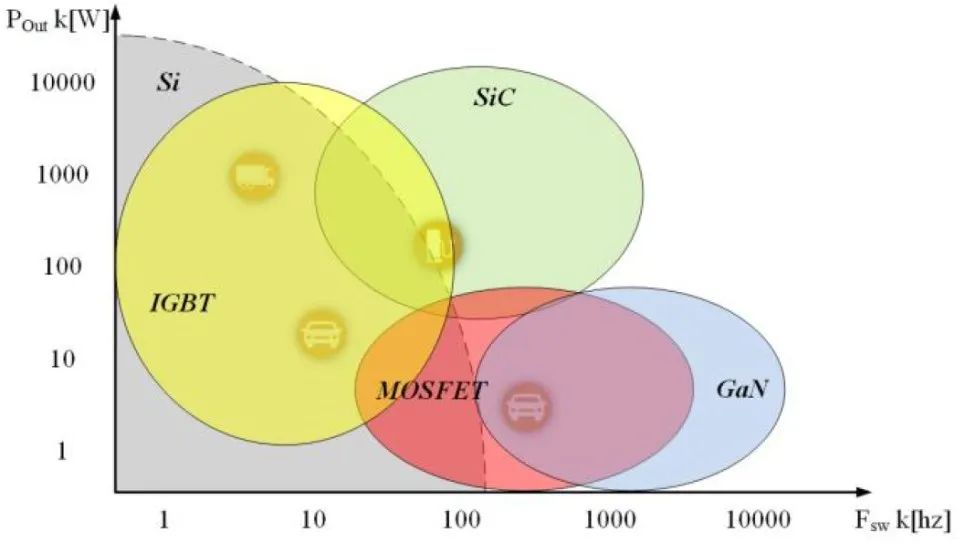
特に従来のIGBTでは、一般に20kHz未満の電子IGBTの電子デバイスのスイッチング周波数は制限されています。さらに、スイッチング周波数が高すぎると、デバイスが重度に加熱され、ドライバーの効率が低下します。現時点では、SICデバイスのサポートが必要であり、ほとんどの高速モーターが高電圧800V SICプラットフォームを使用していることがわかります。
第3世代の半導体の代表として、SIC材料は、幅広のバンドギャップ幅、高い分解電界、高い熱伝導率、高い電子飽和度、より高い放射抵抗性を持っているため、高温、高い生産により適しています。 - 周波数、放射線耐性、高出力デバイスなので、SICは新しいエネルギー車の最高のパフォーマンスを達成するための理想的な選択肢となっています。
スイッチング周波数が高いということは、FOC動作周波数が高いことを意味するため、高速モーターはプロセッサに特定のコンピューティングパワーを必要とします。もちろん、現在の自動車プロセッサのほとんどは仕事をすることができ、通常のフォーカスループは数マイクロ秒で完了できます。たとえば、S32K39XまたはTricoreのTC3XXなど。
ハードウェアの観点から、高速モータードライブに必要な高いスイッチング周波数は、EMCの新しい問題と、パワーサーキットの信頼性に新しい課題をもたらすことを必然的にもたらします。ソフトウェアに関しては、AutoSARに加えて、従来のモータードライブに必要な機能的安全性と情報セキュリティに加えて、高速モータードライブは、温度の変化と構造強度でモーター内のさまざまなパラメーターの複雑な変化に特別な注意を払う必要があります。 、システムの非線形性と未解決の不確実性の問題をもたらします。同時に、プロセッサの負荷をリアルタイムで監視する必要があり、高帯域幅の電流制御とトルク制御を実現する必要があります。
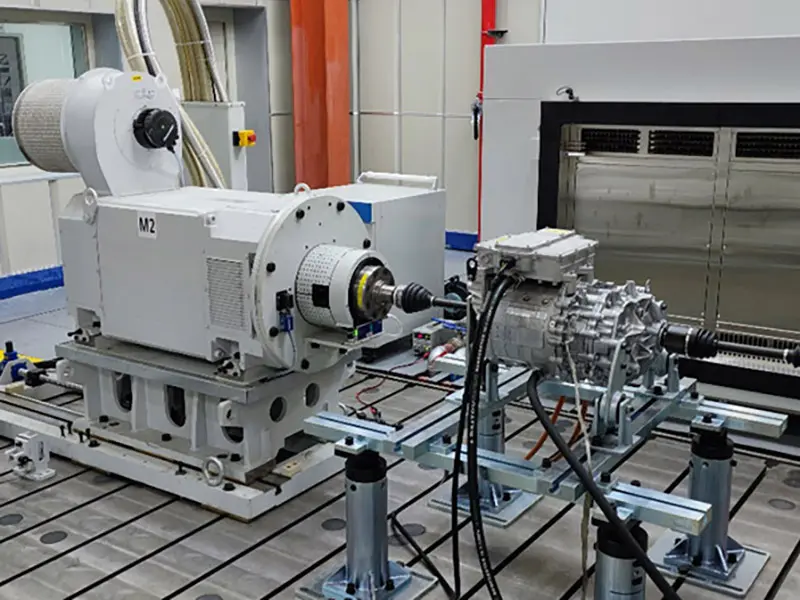
一般に、高速モーターとハイトルクモーターには多くの重要な課題と技術があります。これらの問題は同時に管理する必要があります。これは、通常のモーターよりも困難です。機械的磁気 - サーマルNVH多目的カップリングアプローチを採用する必要性は、新しい課題であり、新しい機会です。 Pumbaaは同時にこの方向で働いており、市場、消費者、一般のニーズを満たす製品を開発しています。
高速および高トルクモーターと高トルクの低速モーター
高速モーターと高トルクモーターと高トルクの低速モーターの主な違いは、設計目標、アプリケーションシナリオ、およびパフォーマンス特性です。これら2つのタイプのモーターの主な違いは次のとおりです。
1。速度とトルクの特性:
- 高速および高トルクモーター:これらのモーターは、通常数千rpmを超える高速アプリケーション用に設計されています。それらは、高出力密度、小さなサイズ、軽量で特徴付けられているため、風力タービン、電気自動車など、速い回転や高効率が必要な場合に適しています。
- 高トルクの低速モーター:これらのモーターは、通常、1分あたり数百回の回転で、高トルク出力を必要とする低速アプリケーション用に設計されています。それらの利点には、優れた開始力と加速能力が含まれ、重機、コンベアベルトなど、高出力と低速および高トルク出力を必要とする場合に適しています。
2。アプリケーション:
- 高速および高トルクモーター:高速列車、高性能ドローンなど、高速応答と高速操作を必要とする機器に適しています。
- 高トルクおよび低速モーター:電気自動車、工業用クレーンなど、開始加速、登山、荷重などに対処するために大きなトルクを必要とする機器により適しています。
3。構造と制御:
- 高速および高トルクモーター:高速動作要件により、通常、繊細な製造プロセスと厳密な同心性保証、および安定した動作を維持するための効率的な冷却システムが必要です。
- 高トルク低速モーター:通常、減速装置デバイスを介して低速および高トルク出力を達成するために必要なこれらのモーターは、設計がより複雑になる可能性がありますが、制御および駆動システムは高速のモーターよりも単純な場合があります。モーター。
要約すると、高速および高トルクモーターまたは高トルクの低速モーターの選択は、機器が必要とする速度、トルク、電力、空間の制約など、実際のアプリケーション要件に従って包括的に考慮する必要があります。
適切な高速高トルクモーターを選択するためのヒント
適切な高速高トルクモーターを選択することは、いくつかの重要な要因を含むプロセスです。考慮すべき重要なヒントは次のとおりです。
高速および高トルクモーターを選択するためのヒント
1。アプリケーション要件分析:モーターの環境条件だけでなく、モーターの必要な作業速度、電力需要、トルク特性を明確にします。
2。モータータイプの選択:DCモーター、永久磁石同期モーターまたは誘導モーターは、アプリケーション要件に従って選択されます。
3.熱散逸能力の考慮事項:高速操作中に発生した熱に対処するために、モーターが空気冷却、水冷、オイル冷却などの効果的な熱散逸設計があることを確認します。
4.ベアリングおよび機械構造の設計:セラミックベアリングや磁気浮揚ベアリングなど、高速回転に耐えることができるベアリングタイプを選択し、ローター設計が高速動作で遠心力の力に耐えることができることを確認します。
5.ドライブおよび制御要件:周波数コンバーターが十分な高周波数出力を提供できることを確認し、高解像度エンコーダまたはホールセンサーを備えたモーターを選択して、正確な制御を実現します。
6。効率とコストの考慮事項:高効率モーターを選択して、モーターのコストとメンテナンスコストを考慮しながら、エネルギー廃棄物を削減します。
高速および高トルクモーターのアプリケーションエリア
高速および高トルクモーターは、次のように、高速回転と大きなトルク出力を必要とする場合に広く使用されています。
(1)高速モーターは、エアコンや冷蔵庫用の遠心コンプレッサーなどのさまざまな場合に使用され、科学技術の開発により、ますます特別な要件があり、そのアプリケーションはますます広範になります。
(2)自動車産業でのハイブリッド車両の開発により、サイズと軽量の高速発電機は完全に評価され、ハイブリッド車、航空、船舶、その他のフィールドで適切なアプリケーションの見通しがあります。
(3)ガスタービンによって駆動される高速発電機のサイズは小さく、高可動性が高く、いくつかの重要な施設のバックアップ電源に使用でき、独立した電源または小さな電源としても使用できます。重要な実用的な価値を持つ集中電源の不足を補うためのステーション。
上記の要因を検討することにより、アプリケーションのニーズに最適な高速で高トルクモーターを選択できます。

新しいエネルギー車における高速モーターのアプリケーションは何ですか?
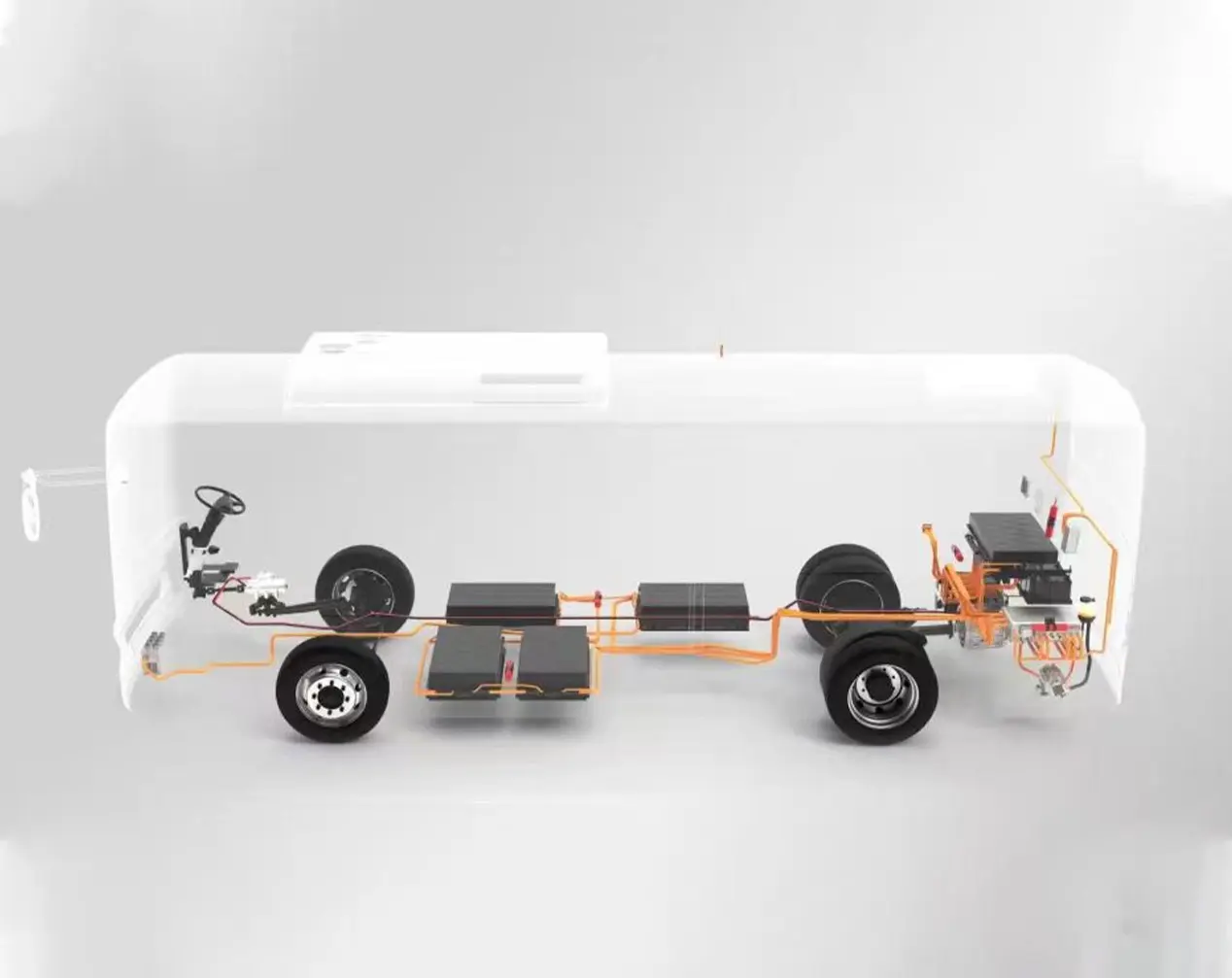
バッテリー電気自動車(BEV):高速および高トルクモーターは、純粋な電気自動車の主要な電源であり、効率的な運転力を提供します。高速モーターは、発電、加速性の性能、範囲の電気自動車の要件を満たすことができます。
ハイブリッド電気自動車(HEV):ハイブリッド車両では、ハイブリッド車両で高速、高トルクモーターが使用され、追加の電力サポートと回復ブレーキエネルギーが提供されます。高速電気モーターと協力することにより、ハイブリッド車両は燃費の増加と排出量の削減を達成できます。
延長範囲の電気自動車(EREV):高速で高トルクモーターは、拡張範囲の電気自動車に重要な役割を果たします。車両を充電し、電気モードで範囲を拡張するための発電機として使用できます。
高性能電気自動車:高速、高トルクモーターは、高性能の電気自動車で重要な役割を果たします。その高出力密度と高速応答は、優れた加速と運転体験を提供します。
以下は特定のアプリケーションモデルです。
テスラモデルS:テスラモデルSは、高速密度と高効率の高速電気モーターによって駆動されます。この電気セダンは、優れた加速パフォーマンスと長距離であり、新しいエネルギー車両市場のリーダーの1つになっています。
NEO EP9:NEO EP9は、強力な出力を提供するために複数の高速電気モーターを装備した高性能電気スーパーカーです。 EP9は、驚くべき加速パフォーマンスと非常に高い最高速度で、自動車の世界の焦点となっています。
BYD QIN Pro EV:Qin Pro EVは、高速電源として高速電気モーターを使用するコンパクトなプラグインハイブリッドモデルです。省エネ、環境保護、運転性能のバランスをとっており、市場で多くの注目を集めている新しいエネルギー車の1つになりました。
結論
将来、電力駆動システムは高出力密度と低コストの方向に発展し、高速はこの目標を達成するための重要な技術的手段の1つです。モーターサイズを縮小できるように、トルクを減らすことができ、モーター材料の量も減らすことができ、モーターコストの削減ももたらします。したがって、モーターの高速には、ハイブリッド車両の適切なアプリケーションの見通しがあります。テクノロジーの継続的な進歩と革新により、高速および高トルクモーターは、電気自動車業界の開発を促進し続け、より効率的で環境に優しい、優れた運転体験をユーザーに提供すると考えられています。
続きを読む:ガスカーをハイブリッドに変換:ステップバイステップガイド