








News










































永久磁石同期モーターのパラメーターを読み取る方法は?
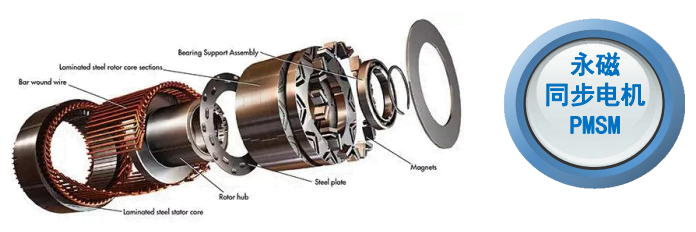
永久磁石同期モーターのパラメーターを読み取る方法は?
理解します永久磁石同期モーター(PMSM)のパラメーター選択、適用、制御、障害の診断の基礎です。
これらのパラメーターは通常、2つのカテゴリに分割されます。
プレートパラメーター/基本パフォーマンスパラメーター:これらは通常、モータープレートまたは製品マニュアルのパフォーマンス仕様テーブルに直接マークされます。これは、ユーザーが最も一般的に遭遇します。
設計パラメーター/等価回路パラメーター:これらのパラメーターは、モーターの詳細な分析、正確な制御、シミュレーションモデリングに重要です。それらは通常、製品マニュアルの技術的な付録、設計文書、または取得するためにテストが必要です
以下は、これら2つのタイプのパラメーターを詳細に説明しています。
I.ネームプレートパラメーター /基本パフォーマンスパラメーター
1。定格電力:
意味:定格条件(定格電圧、定格速度、定格荷重、指定された冷却条件など)でモーターが連続的に、安全かつ確実に出力できる機械的パワー。ユニットは通常、キロワットまたは馬力です。
表示:これは、負荷要件を満たすためにモーターを選択するためのコアパラメーターです。負荷に必要な最大連続電力が、モーターの定格電力以下であることを確認してください。定格電力とピーク電力の区別(短期過負荷容量)に注意してください
2。定格電圧:
意味:設計中に指定され、モーターのステーター巻線に適用されるライン電圧の有効値。ユニットはボルトです。
ドライバーが搭載したモーターの場合、これは通常、AC側に変換されたインバーターDCバス電圧の同等の値を指します。
表示方法:ドライバーの出力電圧容量に一致する必要があります。電圧が高すぎると断熱性が損傷するか、磁気飽和を引き起こします。電圧が低すぎると、定格の出力とトルク、性能の低下ができません。
3。定格電流:
意味:運動が定格電力、定格速度、定格電圧を出力したときの電源からのステーターラインの有効な値。ユニットはアンペアです。
見方:入力電源の計算に使用し、ドライバーの電流容量(ドライバーの定格電流がモーターの定格電流よりも大きくなければならない)を選択し、電源ラインと過負荷保護デバイスを設計します。また、間接的に銅の損失のサイズを反映しています。
定格速度:
意味:定格電圧、定格周波数、定格出力電力でのモーターの回転速度。ユニットは毎分回転しています。
負荷の速度要件に一致する必要があります。モーターが一定の速度で動作しているかどうかを理解する方法:速度で動作するように調整する必要があります。定格速度と最大速度の違いに注意してください(機械的強度と弱い磁力によって制限されます)
5。定格頻度:
意味:電源の周波数モーターが正弦波電源(たとえば、グリッド)によって直接搭載されている場合。周波数コンバーターによって駆動されるモーターの場合、このパラメーターは通常、定格速度でドライバーの出力周波数を指します。
表示方法:電力周波数アプリケーションの場合、グリッド周波数(50Hzまたは60Hz)と一致する必要があります。可変周波数アプリケーションの場合、このパラメーターは定格速度(n = 60f /p、ここでpは極の数)に直接関連しています。
6。定格トルク:
モーターが定格速度で定格電力を出力すると、モーターによって生成される機械的トルク。ユニット:n・m。
式は次のとおりです。t= p/wでは、pは定格電力(watt)、wは定格角速度(radian/second、w =2πn/60、nはrpmの定格速度)です。これは、負荷のゼロ抵抗トルクを克服するために必要なコアパラメーターです。定格トルクとピークトルク(短期過負荷容量)の違いに注意してください。
7。効率:
モーターの定格効率は、電力を入力するための出力機械的電力の割合比として定義されます(Pin =√3 * v定格、Vは3相システムの定格電圧)。式n =(p_out / p_in)×100%は、電気エネルギーを機械的なパワーに変換する能力を示しています。効率が高いと、エネルギー損失(銅の損失、鉄損失、機械的損失、漏れ損失を含む)が削減され、運用コストが削減されます。モーターネームプレートに表示される効率は、通常、定格状態のみを反映していることに注意してください。
8。力率:
意味:評価された労働条件下での入力アクティブパワー(COSφ)に対するアクティブパワーの比率。電流と電圧波形の相関係と電流歪みの程度を反映しています。
それを見る方法:高電力率は、グリッドの高い利用率を意味し、グリッドに対する「汚染」が少ないことを意味します。 PMSMには通常、定格条件下で高い力率(1に近い)があります。ドライバー(インバーター)自体は、入力側の力率にも影響します。
9。頻度:
意味:モーターの磁場の磁性極の総数(NおよびS極がペアに表示されます)。極の数は通常、ネームプレートに示されています。
表示:モーターの同期速度と電源周波数(n同期= 60f/p)の関係を決定します。より多くの極は、同期速度が低くなりますが、潜在的に高いトルク密度をもたらします。制御アルゴリズムに影響するパラメーター(例えば、オブザーバー帯域幅)
10。断熱クラス:
意味:モーター巻線の断熱材の最大動作温度が指定されています。一般的なグレードは、B(130°C)、F(155°C)、H(180°C)です。
見る方法:モーターの許容温度上昇と過負荷容量を決定します。高温の環境または高い過負荷を必要とするアプリケーションでは、より高い断熱勾配のモーターを選択する方が安全で信頼性が高くなります(例:FまたはH)。
11。保護クラス:
意味:IPコードは、固体異物(1桁)と液体(2桁目)を防止するモーターハウジングの能力を示しています。たとえば、IP54(防塵および防水性)、IP65(防塵および耐水性)、IP67(防塵および短期浸漬耐性)。
見る方法:モーター設置環境のほこり、湿度、水分条件に応じて選択します。屋外で湿気の多い埃っぽい環境には、高い保護クラス(IP65以降など)が必要です
12。冷却モード:
意味:運動熱散逸の方法。一般的なものは、I0 411(セルフファン冷却、表面熱散逸)、I0 416(強制空気冷却、外部ファン)、I0 410(自然冷却、ファンなし)、IC71W(水冷却)です。
見る方法:それは、モーターの電力密度と連続動作能力に影響します。高出力またはコンパクトモーターは、多くの場合、空気冷却または水冷を強制されます
ii。設計パラメーター/等価回路パラメーター
これらのパラメーターは通常、ベクトル制御、シミュレーション、効率の最適化、性能予測のためのモーター(DQ軸モデル)の数学モデルを確立するために使用されます。
1。ステーター抵抗:
意味:DCまたは低周波数下で巻かれているステーターの各フェーズの抵抗値。ユニットはオームです。通常、位相抵抗を指します。
それを見る方法:それは銅損失の計算、電流ループ制御パラメーターの設定、および温度上昇の推定に影響します。温度の影響を大きく受けます(温度とともに増加)
2.D軸インダクタンス / Q軸インダクタンス:
意味:ローター回転座標系(D軸とQ軸)で定義されたステーターインダクタンスパラメーター。 d軸は永久磁石の磁場の方向に沿っており、Q軸はA軸よりも90度の電気角です。
LD:D軸インダクタンス。永久磁石の存在により、D軸磁気回路の磁気抵抗は大きく、LDは通常小さいか、または負です(埋め込まれたPMSMの場合)
Q軸インダクタンス。 Q軸磁気回路は、主にステーターとローターのコアを通過し、磁気抵抗が低く、LQは通常大きくなります。 LA:
キーパラメーターは決定します:電磁トルク:t =(3/2)×p [ψ±×lq +(ld-lq)×ld×lq](ここで、ψ±は永久磁石フラックスリンケージを表します)。 PMSMを生成するPMSMの抵抗性トルクを生成する基本原理は、LD = LQにあります(顕著な極比が高いIPMSMの場合)。弱い磁性能力:LD値が小さいことにより、通常、より広い弱い磁石動作範囲と優れた高速性能が可能になります。現在のループ帯域幅とコントローラーの設計:インダクタンスは、現在のループの1次慣性コンポーネントの一次時定数を構成します。電磁逆波形と振幅は、磁気飽和レベル(特に高電流)の影響を大きく受けます。
3。永久磁石フラックス:
意味:ステーター巻線の永久磁石によって生成された磁気リンクの振幅。ユニットはウェーバーです。通常、ステーター巻線のローター永久磁石場によって誘導される最大磁気リンクを指します。
見る方法:コアパラメーター!それは決定します:
Back EMF定数:ke =ψpm * w(ここで、wは電界の角速度です)。バックEMFは回転速度に比例します。
トルク定数:kt≈(3/2) * p *ψ±(表面に取り付けられたSPMSMの場合、LD≈LQ)。トルクはQ軸電流に比例します。
基本速度:定格電圧でモーターが達成できる最大速度(バックEMFがバス電圧に近い場合)
弱い磁気制御の出発点。
4。emf constant:back:
定義:モーターによる革命ごとに生成されるバックEMFの大きさ(通常、バックEMFを参照)。ユニットはv/(krpm)またはvs/°です。測定方法:永久磁石フラックスリンケージψpm(ke =ψpm×w)に直接関連しています。任意の回転速度(E = ke×n)でEMFを推定するために使用されます。これは、ドライブに必要な最小バス電圧を決定し、過剰変調を防ぎ、弱い磁石制御を実装するために重要です。ノーロードバックドライブテストを介して測定可能。
5。トルク定数:
意味:単位電流あたりのモーターによって生成されるトルクの大きさ(SPMSMの場合、約kt≈(3/2)*p*ψpm)。ユニットはnm/aです。
参照:特定のトルクコマンド(LQ_REF = T_REF / KT)に必要なQ軸電流コマンドを推定するために使用されます。 IPMSMの場合、磁気耐性トルクの存在のためにKTは一定ではなく、IDによって異なることに注意してください。
6。電気時定数:
意味:通常、現在のループの電気時定数を指します。T_E= L / R(Lは通常LQまたは平均として使用されます。Rは位相抵抗です)
見る方法:それは、現在のループの応答速度を決定する設計電流ループコントローラー(通常はPIレギュレータ)の重要なパラメーターです。
7。機械的時定数:
意味:運動および荷重慣性、摩擦およびその他の要因の時定数を考慮すると、tm = j *r/(kt *ke)(jは総慣性)
見る方法:速度リングの応答速度は、スピードリングコントローラーの設計のための重要な参照です
8。慣性の瞬間:
意味:モーターローター自体の慣性モーメント。ユニットはkg・mですか?読み方:モーターの加速/減速能力、速度ループの動的応答、負荷障害に対する感度に影響します。サーボシステムには、慣性モーメントを一致させるための要件があります。
9。最大電流:
意味:モーターまたはドライバーが許可する最大短期電流(ピーク電流)。通常、定格電流よりもはるかに大きくなります。
表示方法:モーターの短期過負荷容量(ピークトルク)を決定します。巻線加熱、永久磁石の消磁リスク、ドライバーの電流制限などの要因によって制限されています。
10。回転慣性:
意味:モーターローター自体の慣性モーメント。ユニットはkg・mですか?
それを見る方法:それは、モーターの加速/減速能力、速度リングの動的応答、および負荷妨害に対する感度に影響します。サーボシステムには、回転慣性の一致の要件があります。
11。最高速度:
意味:fモーターが機械的強度、寿命、振動、ノイズの要件の下で到達できる最大速度。通常、定格速度よりもはるかに高い。
表示方法:モーターの動作速度範囲を決定します。最高速度では、トルク出力を維持するには通常、弱い磁気制御が必要です。
これらのパラメーターをどのように見ていますか
1。明確な目的:
選択とマッチング:荷重要件、環境条件、電源要件が満たされていることを確認するために、ネームプレート(電力、電圧、速度、トルク、保護、冷却)のパラメーターに焦点を当てます。効率に焦点を当てる(長期運用コスト)
ドライブ構成と制御:ネームプレートパラメーターに加えて、設計パラメーター(R、LD、LQ、ψpM)を、高性能ベクトル制御を達成するための基礎として取得する必要があります(例:F0C)。コントローラーパラメーター(PIゲイン、またはKE/KT)とオブザーバーパラメーターは、これらのパラメーターに従って設定する必要があります。
パフォーマンス分析とシミュレーション:正確な数学モデルを確立するには、同等の回路パラメーターの完全なセット(R、LD、LQ、ψPM、Y、摩擦係数など)が必要です。
障害診断:パラメーターの変化(抵抗の増加などは、巻線の過熱を示す可能性があり、インダクタンスの変化は、診断基盤として使用できる可能性があります。
2。パラメーター間の関係に注意してください。
パワー、速度、トルク:P = T*W
電圧、バックEMF、電流、インダクタンス:V≈E + IR + JWLI(ベクター関係)
トルク、磁束、電流:t =(3/2)* p* [ψ±* lq +(ld-lq)* ld* lq]速度、周波数、極対数:n_sync = 60f/p背面電気フラックス:ke∝ψ±±±±±±
3。パラメーターの条件付き性質を理解する:
多くのパラメーター(特に設計パラメーターR、LD、およびLQ)は定数ではありません。温度、電流(磁気飽和)、ローターの位置(歯溝効果)によって異なります。高性能制御は、これらの非線形因子を考慮する必要があります。機器の仕様ネームプレートは、特定の条件(定格電圧、周波数、荷重、冷却、温度)で定義されます。実際の動作条件がこれらの理想的なシナリオと異なる場合、パフォーマンスは定格ポイントから逸脱する可能性があります。
4。公式文書を検索します:
モーターの仕様は、製品マニュアル内の機器ネームプレートとパフォーマンス仕様のテーブルに詳述されています。重要な設計パラメーター(R、LD、LQ、ψpm、KE、KT)は、通常、「技術的パラメーター」、「同等の回路パラメーター」、またはマニュアルの「制御パラメーター」セクションで提供されます。利用できない場合は、メーカーのドキュメントを取得する必要があります。異なる飽和レベルでのインダクタンス曲線などの詳細なパラメーターには、特殊な設計文書またはテストレポートが必要になる場合があります。
5。テスト測定:
公式パラメーターを取得できない場合、実験測定(ブロックテスト、ロードドラッグテスト、LCRメーター測定、パラメーター識別アルゴリズムなど)が必要です。ただし、これには専門的な機器と知識が必要です。