








News










































EVSのインスタント加速の背後にある秘密:MCUコントロールロジック内
電気自動車(EV)は、スリリングで静かな加速と同義語になっています。ペダルをタップすると、パフォーマンスガス車でさえ一致するのに苦労しているという即時性の感覚で前進します。しかし、この瞬間的な力の感覚を生み出すものは何ですか?答えは、特にモーターコントロールユニット(MCU)として知られている小さいながらも強力なシステムで、車両の電子機器の奥深くにあります。このブログは、MCU制御ロジックの重要な役割と、ドライバーの意図をシームレスなトルクと爽快な加速にどのように変換するかを探るために、フードの下にあなたを連れて行きます。
なぜEVは停止からそんなに速く感じるのですか?
電気自動車で運転したり座ったりしたことがあるなら、最初に気付くのは、ゼロからどれほど衝撃的に加速するかということです。テスラモデル3、バイドイルカ、またはコンパクトなEVシティカーであろうと、応答性は不気味です。この「スナップ加速」は単なる仕掛けではなく、電気ドライブトレインと車両のMCUのリアルタイムの決定に起因するエンジニアリングの驚異です。
機械的および燃焼遅延により徐々に電力を蓄積する必要がある内燃機関(ICE)車両とは異なり、EVはピークトルクを即座に提供します。これは、最大のトルクに到達するために複雑なギアシフトやエンジンRevsに依存しない電気モーターに固有のものです。
しかし、生のモーター能力はストーリーの一部にすぎません。MCUの制御ロジックは、このトルクが適切な瞬間に、適切な量で、安全や快適さを犠牲にすることなく提供されることを保証します。

ユーザーエクスペリエンスにおける加速感の重要性
速度は一つのことです。知覚される加速も別です。
今日のEVメーカーは、範囲とデザインだけでなく、加速がどれほどスムーズで、自然で、刺激的であるかについても競争しています。加速の「感触」は直接影響します。
- ドライバーの自信
- 認識された車両のパフォーマンス
- ブランド認識(テスラの「馬鹿げたモード」と考えてください)
- 乗客の快適さ(ぎくしゃくした加速は不安になる可能性があります)
これは、モーター制御ロジックが極めて重要な役割を果たす場所です。 MCUは、センサーデータ、道路状況、車両荷重、さらには運転モード(Eco、Sport、Normal)に基づいて加速曲線を調整します。結果?内臓で制御可能な運転体験。
MCUとは何ですか、そしてそれはEVで何をしますか?
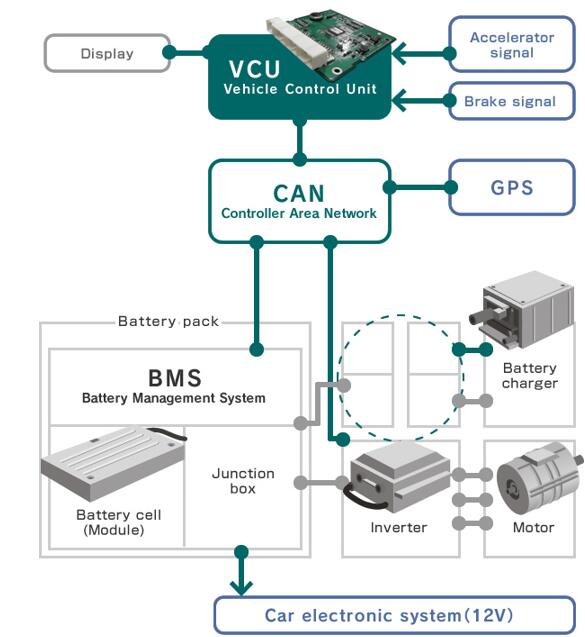
モーターコントロールユニット(MCU)は、EVの電気モーターの管理を担当するデジタル脳です。アクセルペダルとモーターインバーターの間に位置し、ドライバーの意図と電気推進の間の制御層として機能します。
MCUの重要な機能:
- アクセラレータペダル入力を解釈します
- 最適なトルク出力を計算します
- バッテリー電圧、温度、電流を監視します
- モーターの回転速度と方向を管理します
- 再生ブレーキを調整します
- 障害検出を通じてシステムの安全性を保証します
本質的に、MCUは、電動モーターがドライバーの期待、車両の条件、安全プロトコルに沿って動作することを保証します。すべてリアルタイムです。
ペダルからパワーまで:ドライバーの入力を動きに変換します
典型的な一連のイベントを調べましょう。
1.ドライバーがアクセラレータペダルを押します。
2.ペダル位置センサー(多くの場合、ホール効果センサー)は、電圧信号をMCUに送信します。
3. MCUはこの信号を読み取り、どのくらいのトルクを配信すべきかを解釈します。
4.それも参照してください:
- バッテリーステータス
- トラクションコントロールフィードバック
- 運動温度
- 運転モード
5. MCUはコマンドをインバーターに送信し、電圧と電流の流れを電気モーターに調整します。
6.モータースピン - そして、トルクがホイールに送られます。
このサイクル全体は、デジタルエレクトロニクスの速度とモダンMCU内の強力な組み込みプロセッサのおかげで、ミリ秒単位で発生します。
MCUによって加速ペダル信号がどのように解釈されるか
アクセルペダルがボリュームノブのようなものであるという単純な仮定に反して、現代のEVは洗練された解釈技術を使用します。
デュアルチャネルペダル信号
安全のために、ペダルには通常、ペダルの位置に一致しなければならない2つの冗長センサーがあります。MCUそれらを絶えずクロスチェックします。
信号マッピング
MCUはペダルの位置に直線的に応答しません。ドライバーモードに基づいてキャリブレーション曲線を適用します。例えば:
- ECOモード:より緩やかなトルク配信
- 通常モード:バランスの取れた応答
- スポーツモード:攻撃的で高感度トルクマップ
適応フィードバック
一部のMCUは、機械学習または適応アルゴリズムを使用して、ドライバーの動作を学び、時間の経過とともに応答を調整します。これにより、独自のパーソナライズされた運転体験が生まれます。
トルク応答:「インスタント」加速の鍵
EVパフォーマンスの特徴は即時のトルクであり、これを管理することはMCUの最も重要な仕事の1つです。
電気モーターがインスタントトルクを提供する理由
電気モーターは、電流や磁場から直接トルクを生成します。燃焼サイクル、バルブ、またはギアエンゲージメントを待つことはありません。電流がステーターを流れるとすぐに、ローターが回転します。
トルク制御におけるMCUの役割
モーターはすぐに完全なトルクを提供できますが、そうすることは常に安全または効率的ではありません。 MCUは慎重に調節します。
- トルク送達のランプレート(トルクがどれだけ速く蓄積するか)
- ホイールスリップを防ぐための牽引制限
- モーターまたはバッテリーの過熱を防ぐための熱制限
- 効率と範囲の電力最適化
一部のシステムは、特にハイブリッド車両で、ドライバーの親しみやすさや快適さを向上させるために、氷のような動作をシミュレートします。

現代のMCUの制御遅延最適化
レイテンシ - ペダルプレスと車両応答の間の遅延 - は、EVパフォーマンスの敵です。主要なEVブランドは、ジッターやバリエーションを最小限に抑えた10msのコントロールループを目指しています。
遅延のソース:
- ペダルセンサーの信号処理遅延
- MCUのアルゴリズム計算時間
- MCUとインバーター間の通信遅延
- モーター応答遅延(最小)
最適化テクニック:
- マルチコアCPUまたはDSPを備えたより高速なマイクロコントローラー
- リアルタイムタスクに優先順位を付けるための高度なスケジューリング
- ドライバーの入力を予測する予測制御モデル
- ソフトウェアスタックの複雑さを減らしました
これらの遅延を最小限に抑えることにより、EVはそのかみそりの鋭い応答を提供し、加速を瞬時に直感的に感じさせます。
EVSにおけるMCUベースの制御の将来
MCUテクノロジーは、EVのパフォーマンス、安全性、AI統合の需要の高まりを満たすために、急速に進化し続けています。
見るトレンド:
1。ADASおよびAIとの統合
将来のMCUは、Advanced Driver Assistance Systems(ADAS)と統合し、道路状況、歩行者の検出、または交通データに基づいて運動挙動を適応させます。
2。オーバーエア(OTA)チューニング
テスラがソフトウェアの更新を介して加速を促進できるように、MCUはパフォーマンス、効率、または安全性のためにOTAチューニングをサポートすることを期待しています。
3。クラウド接続診断
MCUSは、予測的なメンテナンスとリモート最適化のために、モーターの健康、熱状態、および使用パターンをクラウドにますます報告します。
4。マルチモーター調整
AWDおよびQuadモーターEVでは、MCUSは、トルクベクトル化、トラクション、および再生ブレーキを制御するためにマルチチャネル同期をシームレスに制御する必要があります。
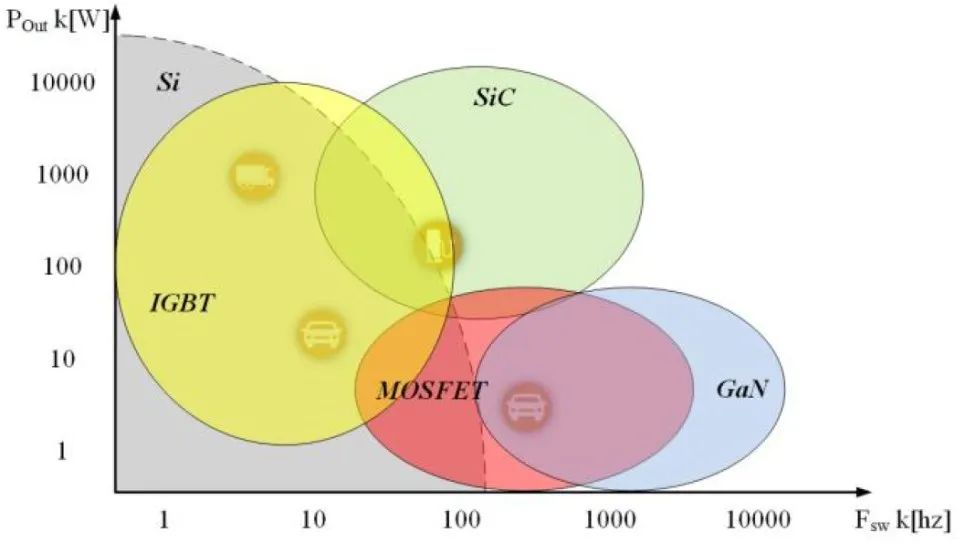
5。炭化シリコン(sic)互換性
Power ElectronicsがSICベースのシステムに移行するにつれて、MCUはより高いスイッチング周波数、よりタイトなサーマルエンベロープ、および高度なエラー処理をサポートする必要があります。
結論
電気自動車の稲妻の加速は、電気モーターの単なる副作用ではなく、モーターコントロールユニット(MCU)が処理する細心のデジタル制御の結果です。ペダルの入力の解釈とトルク配信の管理から、制御の遅延を最小限に抑え、安全性を確保することから、MCUはEV革命の名もなきヒーローです。
EVが進化し続けるにつれて、MCUロジックの役割はさらに重要になります。AI、クラウド接続、およびますます複雑なドライブトレインアーキテクチャとリアルタイムコントロールをブレンドします。次回、爽快なEVの発売を感じるときは、覚えておいてください。それは、電気だけでなく、MCUによって組織されたソフトウェア、センサー、シリコンの交響曲です。